近日,航海学院航海技术研究所张显库教授团队在船舶运动非线性反馈控制方面取得进展,相关研究成果以“nonlinear feedback”, ”nonlinear modification”为关键词在国际航海类顶级期刊Ocean Engineering, Journal of Navigation, Applied Ocean Research上连续发表了20余篇系列研究论文,并集结出版了专著。
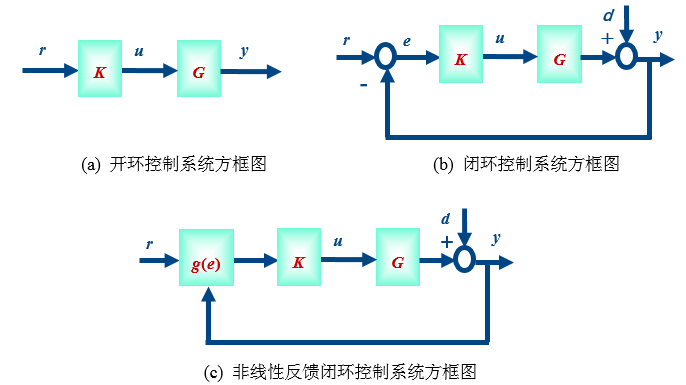
如果以钱学森1958年出版的《工程控制论》作为工程控制发展成熟的标志,60多年来,工程控制都是线性的负反馈控制,而本成果在非线性反馈或非线性修饰研究上取得进展。常规的闭环控制中使用线性控制器控制就像直接用性能较差的照相机照相,而使用非线性控制器进行控制就像使用性能较优的照相机照相,当然照出来的照片质量更好。以前的控制发展总是不断提升照相机的性能,比如由100万像素提升到200万像素再提升到1000万像素,直到现在2000万像素。照相机自从1839年发明以来,不断地在完善自己,直到现在,其性能的改进空间已经趋于饱和。非线性反馈控制不是改变照相机的性能,照相机还是原来的照相机,是在照相之前,对照相的人进行化妆,这样照出的相片质量也会明显好很多;非线性修饰相当于先照相后PS,不管使用哪种技术,最后的相片质量都会明显改善。
非线性反馈算法应该是控制界的通用算法,但因作者长期从事船舶运动控制方面的研究,故该算法一经提出首先在船舶运动控制领域中应用,在船舶航向保持控制、航迹保持控制、船舶减摇、船舶自动靠泊等方面取得了成功应用。
在使用非线性反馈时,如果原来控制器是鲁棒控制器或PID控制器时,系统的控制输出的性能与原来差不多,但控制输入幅值明显减小,从而具有节能降碳的效果,在航海领域,这一优越性能与国家发展战略高度契合。
该工作得到国家自然科学基金委、大连市重点领域创新团队项目和大连海事大学创新团队项目的支持。