近日,轮机工程学院徐敏义团队在《Nano Research》上发表最新研究论文"Highly adaptive triboelectric tactile sensor on the foot of autonomous wall-climbing robots for detecting the adhesion state and avoiding the hazard"。这项工作提出了一种高适应性摩擦电触觉传感器,用于检测腿足式磁吸附爬墙机器人的磁吸附状态,提高机器人自主爬行的避障能力和安全性。

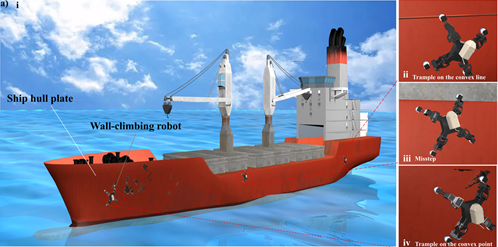
目前,腿足式磁吸附爬壁机器人因其高灵活性而成为船体检测的重要工具。然而,由于船舶的铁磁性金属外板通常具有复杂的结构,包括各种腐蚀点,裂纹和焊缝,机器人在攀爬过程中存在脱落的风险。因此,确保腿足式磁吸附机器人能够稳定的吸附在铁磁性壁面上,并在足部电磁铁与壁面之间建立有效的接触,对于腿足式爬壁机器人的稳定运动至关重要。为了解决这一问题,迫切需要开发一种传感器来监测机器人运动过程中足部的磁吸附状态。
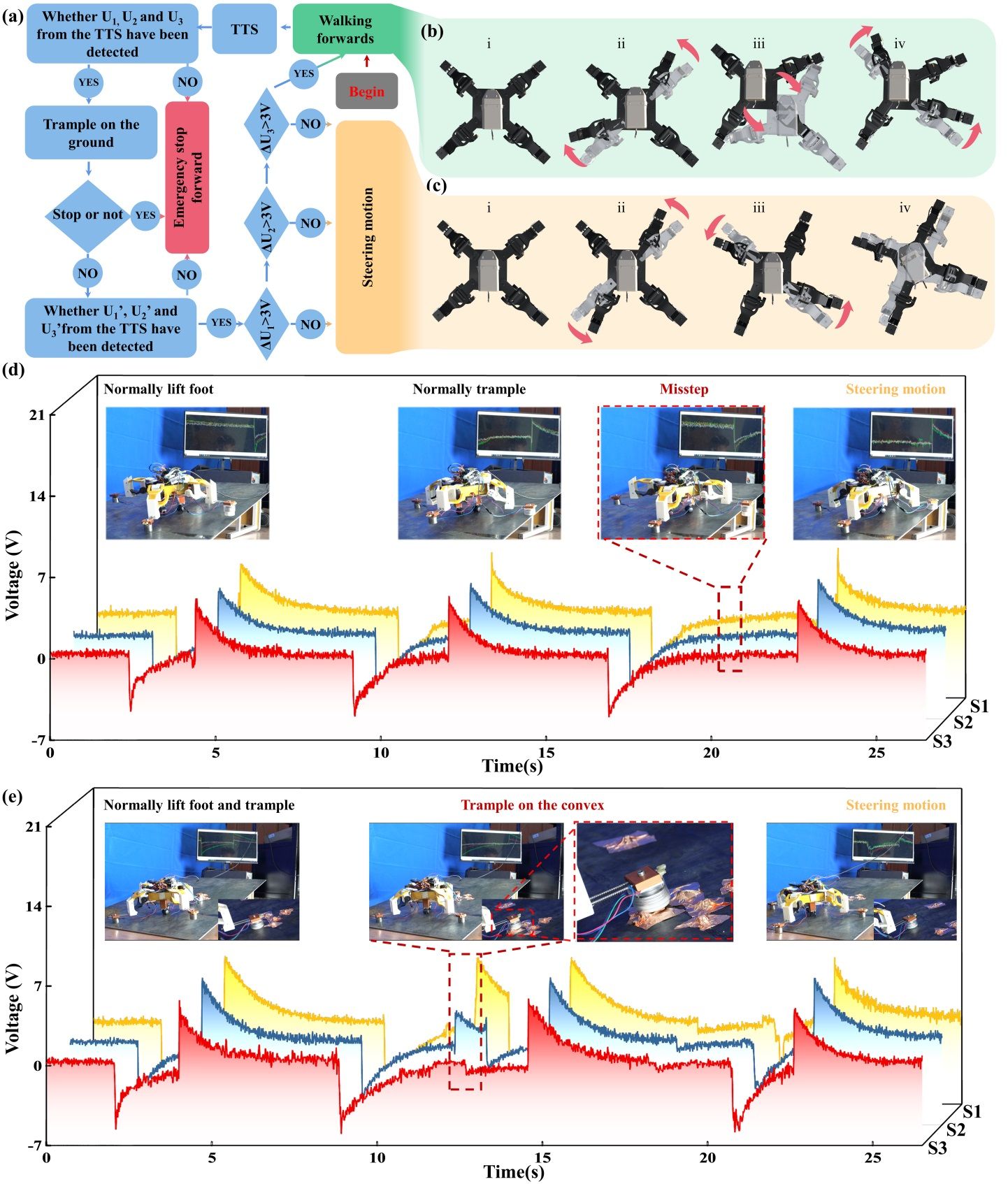
徐敏义教授团队针对腿足式磁吸附爬壁机器人无法感知磁吸附状态的问题,提出了一种用于腿足式爬壁机器人的足部触觉传感器,采用3D打印外壳、触觉滑块和三个等距传感单元组成的结构设计实现了既不影响机器人足部的正常吸附,又能够感知机器人足部的磁吸附状态。本文开展了触觉传感器在触觉滑块不同的滑动频率和滑动深度情况下的性能实验,实验表明触觉传感器能够监测触觉滑块的滑动深度并控制LED信号灯。此外,在监测机器人足部吸附状态的演示实验中,摩擦电触觉传感器对各种铁磁壁面具有较强的适应性,并建立了机器人步态控制系统,验证了摩擦电触觉传感器的反馈控制能力。结果表明,安装了摩擦电触觉传感器的机器人能够识别爬行壁上的危险区域并自主规避危险。
最后,将摩擦电触觉传感器安装于四足磁吸附爬壁机器人足部,当机器人踩踏到钢板上模拟的焊接接缝和腐蚀性凸点时,机器人通过触觉传感器感知到的异常信号能够自动的更换步态,从而避免因机器人足部无法形成稳定磁吸附导致的整机脱落的风险;同时,在机器人踏空后,机器人也能够感知到异常信号并自主避险。本文的研究成果提供了一种具有应用前景的用于腿足式磁吸附爬壁机器人足部吸附状态监测的触觉传感器,机器人通过识别传感器的异常信号进行自主避险,对于腿足式磁吸附爬壁机器人稳定的自主爬行在复杂铁磁性壁面上具有重要意义。
Nano Research重点关注纳米材料科学的基本研究和实际应用,由清华大学和中国化学会主办,是由清华大学出版社和Springer联合出版的一本跨学科国际学术期刊。论文的共同第一作者为大连海事大学轮机工程学院2021级硕士研究生王昭洋、2023级博士研究生刘建华和2020级硕士研究生王梓聿,论文的通讯作者为北京大学工学院博士后徐鹏和大连海事大学轮机工程学院徐敏义教授。
原文链接:https://doi.org/10.1007/s12274-024-6537-1