近日,第十三届中国大学生计算机设计大赛全国总决赛按类别在济南、阜阳、南京、福州、厦门、武汉等地六所高校举行。大连海事大学的31支参赛队伍在信息科学技术学院朱斌等指导教师的带领下在线上参加了除专业组以外全部10个大类的比赛,经过网络演示、评委提问等环节的激烈角逐,我校共斩获国家级一等奖5项、二等奖14项、三等奖12项,在参赛院校获奖总成绩排名全国第二,是我校该项竞赛历史最好成绩。
由于疫情影响,本年度的大赛由现场赛改为了网络赛。我校参赛学子在比赛过程中,克服重重困难,将客观情况造成的影响最小化,并在决赛中发挥了高超的竞技水平,展现了海大学生的风采。
此次比赛充分展示了近年来我校在深化高校教学改革、加强创新创业教学实践、切实提高教学质量方面的成效。学校通过组织学生备赛、参赛,激发了学生学习知识和技能的兴趣与潜力,锻炼了学生的创新创业能力与团队合作意识。近三年我校“大学生创新创业训练计划”立项、结项数,学生获得各类创新创业竞赛奖项数均逐年提升。
“中国大学生计算机设计大赛”由教育部高等学校计算机类专业教学指导委员会、教育部高等学校软件工程专业教学指导委员会、教育部高等学校大学计算机课程教学指导委员会、教育部高等学校文科计算机基础教学指导分委员会、中国教育电视台联合主办,是我国计算机类影响力最大、参与面最广的创新创业竞赛之一。
一等奖作品展播
基于Faster R-CNN的鱼类分类识别算法设计及应用
作品简介:海洋是地球生物多样性的主要来源,但随着人们大范围的海洋捕捞,使珍惜鱼类遭受误捕,导致珍惜鱼类的数量大大下降。严重威胁海洋生态系统,破坏海洋生态环境。
本作品所设计的算法框架的应用场景是针对上诉所提到的问题进行解决,算法主要部署在船上的固定嵌入式设备中或者渔民便携式设备中,通过对摄像头采集的视频流的快速处理,分别输出船上有目标鱼类的定位框和鱼品种识别结果,并伴随语音报警提示。由于目标检测的要求较高,提高检测率的同时还要保证实时性,所以算法主要采用深度学习和神经网络来完成目标检测和识别任务。希望通过本作品,能够让更多的渔民了解捕捞上来的鱼是否为珍惜鱼类并方便渔业监管,进而来保护我们的海洋资源。
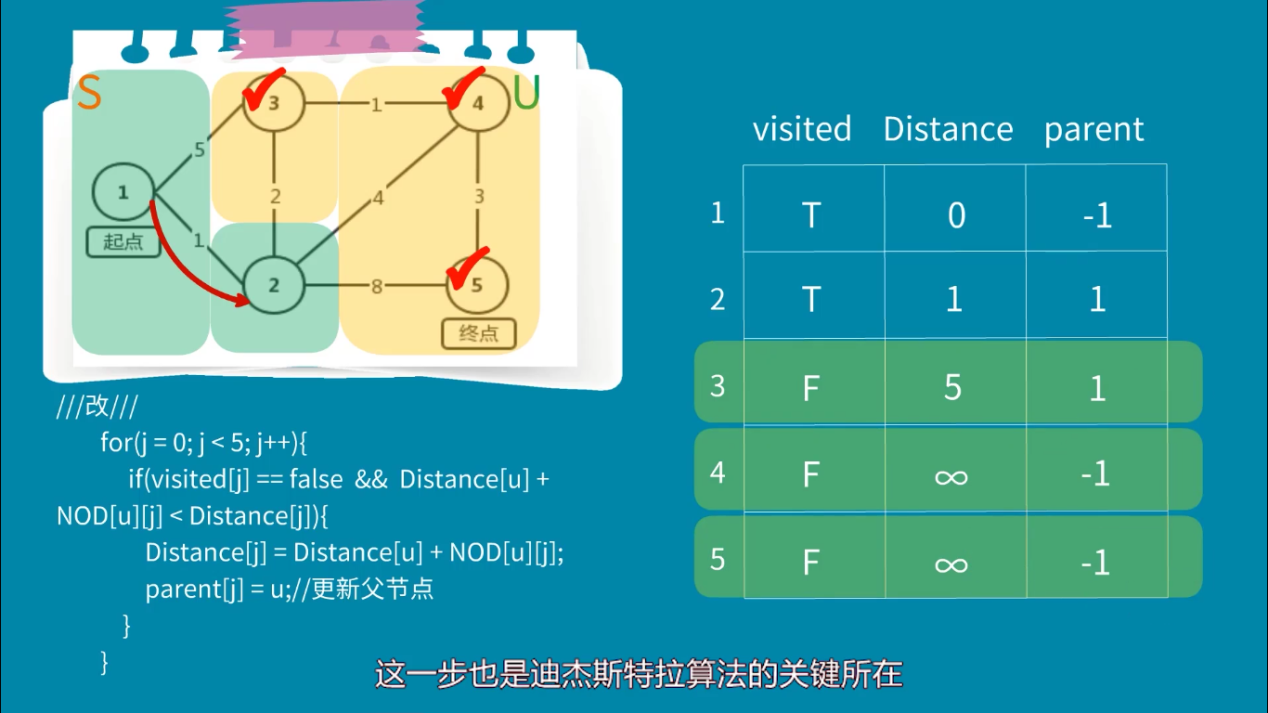
一次学会Dijkstra算法
作品简介:(1)教学目标:“枯燥乏味又难懂”,是很多同学对算法的印象。本次微课作品:一次学会Dijkstra算法,利用生动形象的生活化语言,解构晦涩难懂的算法语言,让基础薄弱或者第一次接触该算法的同学,能够尽快理解该算法思想,融入到算法的学习中。
(2)教学难点:采用动画式讲解的创新方式,将复杂的算法思想、语言具象化处理,让学生更易接受,更好吸收。
(3)课程结构:一次学会Dijkstra算法分为三部分展开讲解,首先,利用生活化的“校园导游”的例子引入Dijkstra算法,其次进行算法核心的讲解,包括基础背景,思想内核和代码介绍,最后提出三个问题,帮助学生巩固所学知识。
整体教学过程符合学生由浅入深的认知逻辑规律,主线清晰,做到了复杂问题具体化,简单化的设计,内容饱满,通俗易懂。
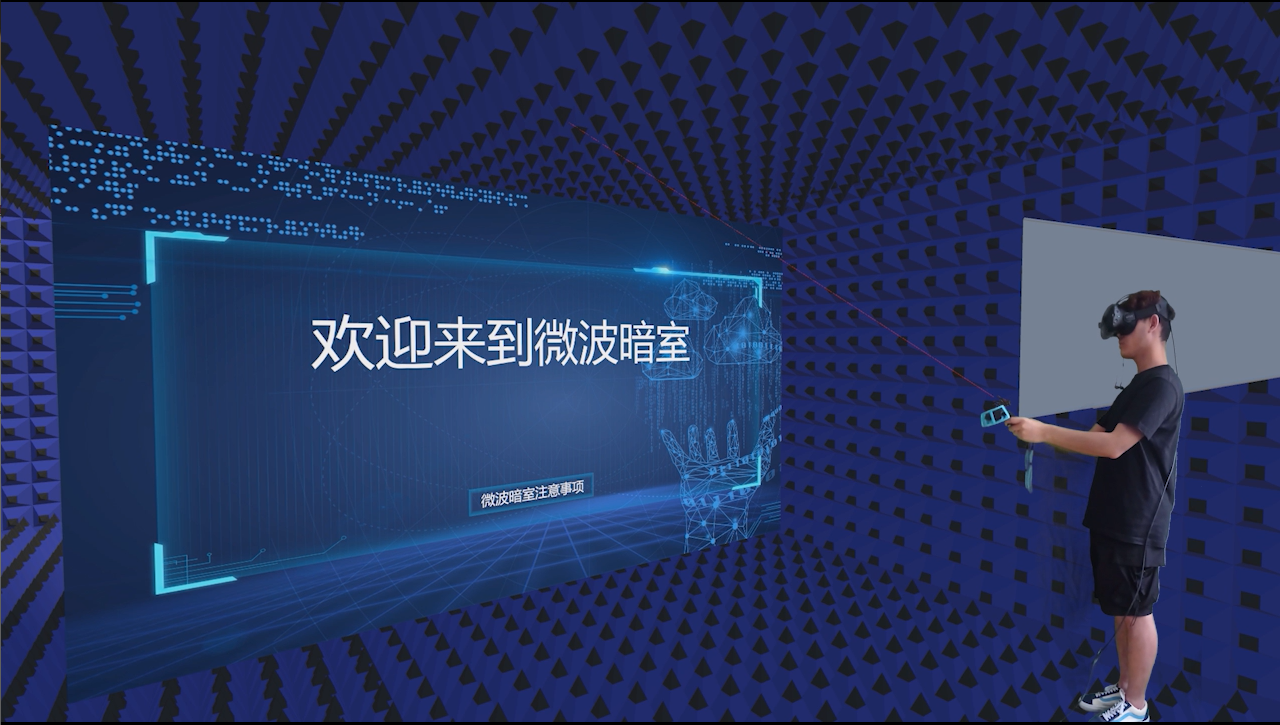
微波暗室VR虚拟实验平台
作品简介:将电子信息工程专业本科重要知识点提炼出来,结合本校研究生使用的实验环境——微波暗室,基于虚拟现实与增强现实技术,开发出一款自主设计验证性虚拟实验平台。平台主要分为AR端预习APP、VR端实验操作平台、辅助计算系统、教师管理端四个部分。
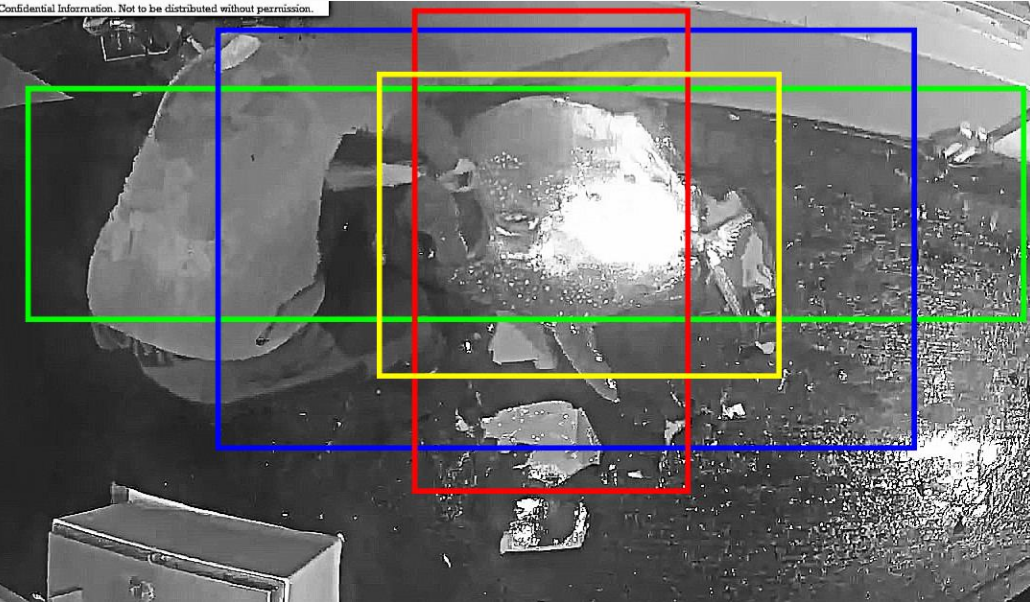
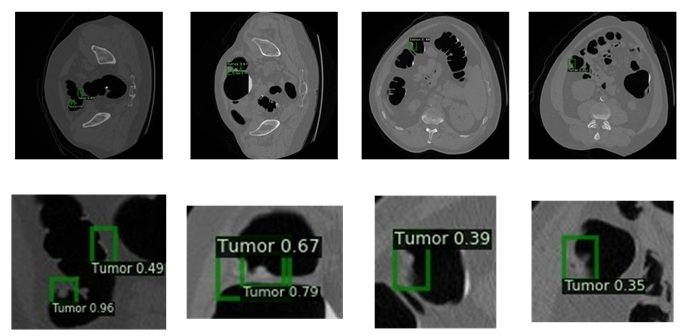
基于广域语义图像外推做数据扩充的结直肠息肉检测方案
作品简介:结直肠息肉检测的难点在于它需要依赖带有标注的大型数据集的监督训练。基本的图像翻转、旋转、平移等操作实现的图像扩充很难大幅度提升检测系统的效能;另外,由于图片上的息肉都是由医学专家利用专业知识、花费大量时间标注而成,具备真实性及权威性,而使用生成对抗网络进行息肉的生成就会面临真实性无法判断的问题。因此本作品使用语义图像外推的思想,提出了一种新颖的应用于医学图像的数据扩充方案。它首先对现有数据集的息肉部分进行裁剪,保证息肉的真实性;然后采用广域语义外推技术进行息肉外围图像的生成,从而实现对数据集的进一步扩充。同其他方法相比,该方法生成的图像更具有说服力, 实验效果验证了该数据集检测结果的优越性。而后,我们构建了Yolo-V3网络实现了结肠息肉的检测,实验结果显示,经过数据扩充后的模型指标取得了明显的提高。
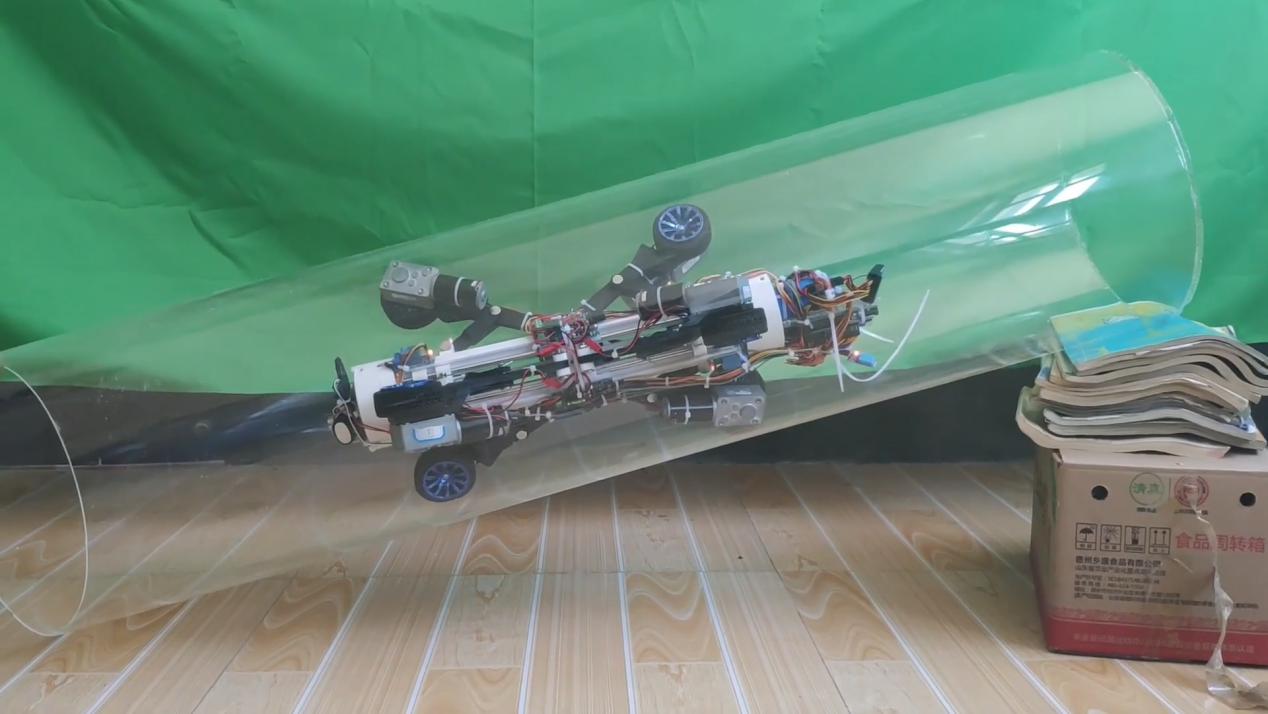
“管道医生”—自适应变径式油气管道裂缝诊断机器人
作品简介:管道运输是一种被广泛应用的物料输送手段,由于油气管道的长期使用很容易发生腐蚀穿孔情况,容易引发严重的人身和公共财产安全事故。因此管道也需要医生来定期“查体”,我们团队开发了管道医生—自适应变径式油气管道裂缝诊断机器人。 机器人采用六轮径向辐射支撑式结构,保证其有足够的驱动力,其独特的变径结构配合受力传感器、自动控制算法实现机器人在管道内的自适应调节,可以在不同半径下管道内稳定爬行。 此外,手机、电脑端可实时观测回传画面并结合人工智能算法进行管道裂痕自动诊断、不同的裂痕数据归类判级等,最终给出管道泄露预警结果。 通过外携其他设备,可利用手机控制,完成腐朽点定位、管道补漏等工作,其拓展性高。