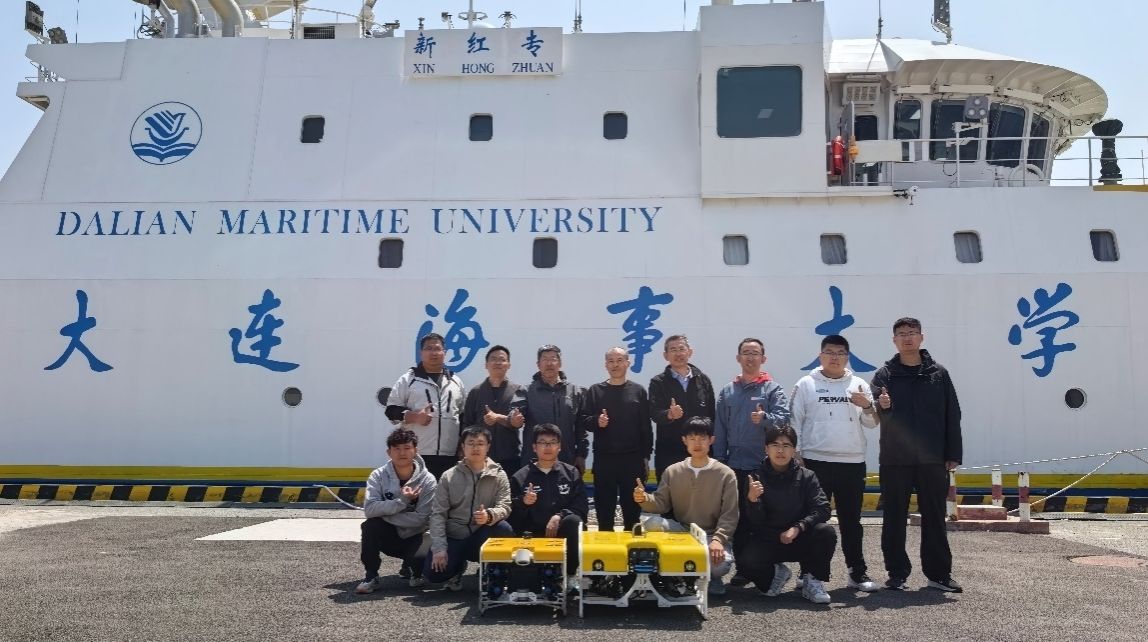
为准备2025年中国航海日“新红专”轮巡展活动,配合“新红专”轮技术验证,2025年5月9日至11日,我校水下机器人科研团队与“新红专”轮在渤海湾海域成功完成了首次智能船与水下机器人协同作业科研实践活动。本次科研实践活动由水下机器人科研团队负责人、信息科学技术学院院长付先平教授带队,在以何庆华船长为首的全体船员的密切配合下,提前两天顺利完成了所有技术验证与科研实践任务。本次活动的圆满完成,不仅完成了“新红专”轮技术验证任务,也开启了“新红专”智能研究与实训两用船服务于科学实践研究的新篇章。活动得到了科技处、实验室与资产管理处等部门的全程支持与保障。


活动开始前,科研及“新红专”双方团队高度重视,依据各项任务要求,经过多次探讨沟通,制定了细致的活动计划。上船前,所有科研团队成员接受了海上作业安全规范、应急逃生技能、恶劣天气应对措施以及设备操作等各个方面的安全教育,全面增强了安全意识和应急处置能力。与此同时,科研团队对执行任务设备及系统进行了充分的测试验证,准备了充足的作业辅助工具,为此次活动的顺利完成奠定了坚实基础。
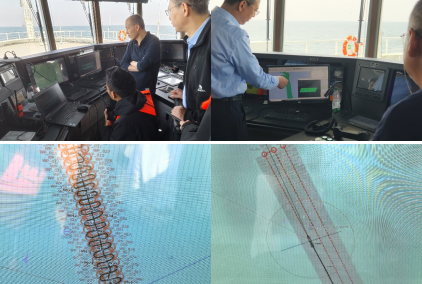
出航时间确定后,在何庆华船长的指导下,科研团队细分作业任务,科学合理安排作业顺序。在刘渐道大副的密切配合下,出航前为每一项作业任务在电子海图上提前规划好船舶航行轨迹。作业过程中,在优异性能的加持下,“新红专”轮完美地完成了直线、S曲线、区域覆盖等多种苛刻的路径航行要求,何庆华船长及全体船员们展现了高超的专业技能。尤其,在5月10日渤海区域突发七八级大风天气造成的六级海况下,所有作业任务均按计划顺利完成,充分验证了“新红专”轮在大风高海况下的优异操作性能和技术可靠性。
面向海底工程实际需求,水下机器人科研团队基于“多波束+侧扫声呐+浅地层剖面仪+水下机器人”多源感知体系,先后开展了海底地形三维建模、管缆路由与埋深精准探测、水下目标快速搜索定位等系列高难度任务。在六级高海况条件下,协同作业系统仍能按计划快速完成作业任务,全面验证了“新红专”轮智能船与科研团队自主研发的水下机器人多域协同作业系统在海底工程中的应用效能,该模式可拓展至海洋应急救援、海洋资源勘探等海洋工程领域。
本次海上联合科研实践活动,是我校科研团队首次以“新红专”轮作为海上母船平台开展的科研实践,首次构建了从实验室到真实海洋环境的全链条科研验证体系。本次活动的圆满完成,不仅完成了“新红专”轮技术验证任务,更探索出“科研平台+自研装备+真实场景”的产学研协同创新模式,为我校海洋科技创新提供了新的实践范式。



 一线风采
一线风采

 最新动态
最新动态